Optimization of Stochastic Objective Function
This example shows how to find a minimum of a stochastic objective function using patternsearch. It also shows how Optimization Toolbox™ solvers are not suitable for this type of problem. The example uses a simple 2-dimensional objective function that is then perturbed by noise.
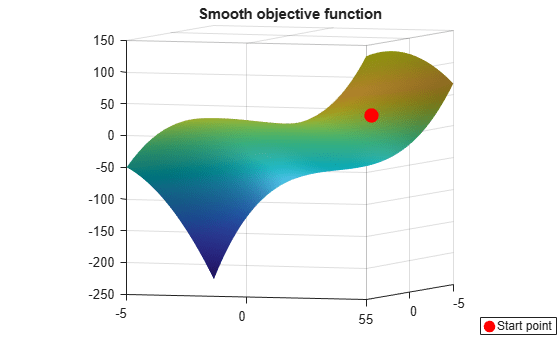
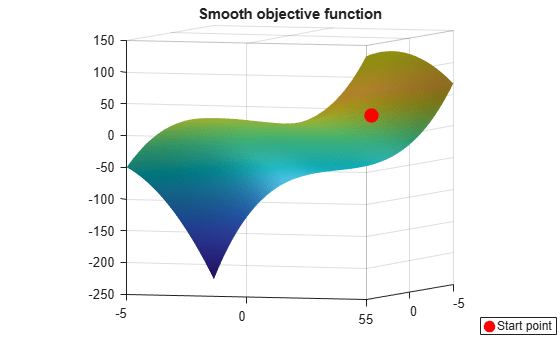
Initialization
X0 = [2.5 -2.5]; % Starting point. LB = [-5 -5]; % Lower bound UB = [5 5]; % Upper bound range = [LB(1) UB(1); LB(2) UB(2)]; Objfcn = @smoothFcn; % Handle to the objective function. % Plot the smooth objective function fig = figure('Color','w'); showSmoothFcn(Objfcn,range); hold on; title('Smooth objective function'); ph = []; ph(1) = plot3(X0(1),X0(2),Objfcn(X0)+30,'or','MarkerSize',10,'MarkerFaceColor','r'); hold off; ax = gca; ax.CameraPosition = [-31.0391 -85.2792 -281.4265]; ax.CameraTarget = [0 0 -50]; ax.CameraViewAngle = 6.7937; % Add legend information legendLabels = {'Start point'}; lh = legend(ph,legendLabels,'Location','SouthEast'); lp = lh.Position; lh.Position = [1-lp(3)-0.005 0.005 lp(3) lp(4)];
Run fmincon on a Smooth Objective Function
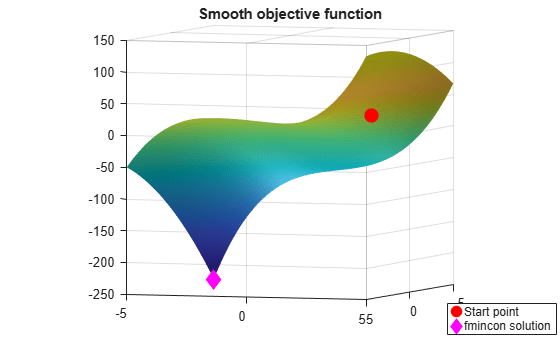
The objective function is smooth (twice continuously differentiable). Solve the optimization problem using the Optimization Toolbox fmincon solver. fmincon finds a constrained minimum of a function of several variables. This function has a unique minimum at the point x* = [-5,-5] where it has a value f(x*) = -250.
Set options to return iterative display.
options = optimoptions(@fmincon,'Algorithm','interior-point','Display','iter'); [Xop,Fop] = fmincon(Objfcn,X0,[],[],[],[],LB,UB,[],options) figure(fig); hold on;
First-order Norm of
Iter F-count f(x) Feasibility optimality step
0 3 -1.062500e+01 0.000e+00 2.004e+01
1 6 -1.578420e+02 0.000e+00 5.478e+01 6.734e+00
2 9 -2.491310e+02 0.000e+00 6.672e+01 1.236e+00
3 12 -2.497554e+02 0.000e+00 2.397e-01 6.310e-03
4 15 -2.499986e+02 0.000e+00 5.065e-02 8.016e-03
5 18 -2.499996e+02 0.000e+00 9.708e-05 3.367e-05
6 21 -2.500000e+02 0.000e+00 1.513e-04 6.867e-06
7 24 -2.500000e+02 0.000e+00 1.161e-06 6.920e-08
Local minimum found that satisfies the constraints.
Optimization completed because the objective function is non-decreasing in
feasible directions, to within the value of the optimality tolerance,
and constraints are satisfied to within the value of the constraint tolerance.
Xop =
-5.0000 -5.0000
Fop =
-250.0000
Plot the final point
ph(2) = plot3(Xop(1),Xop(2),Fop,'dm','MarkerSize',10,'MarkerFaceColor','m'); % Add a legend to plot legendLabels = [legendLabels, '|fmincon| solution']; lh = legend(ph,legendLabels,'Location','SouthEast'); lp = lh.Position; lh.Position = [1-lp(3)-0.005 0.005 lp(3) lp(4)]; hold off;
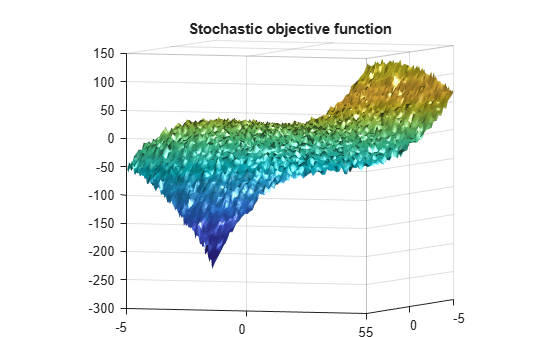
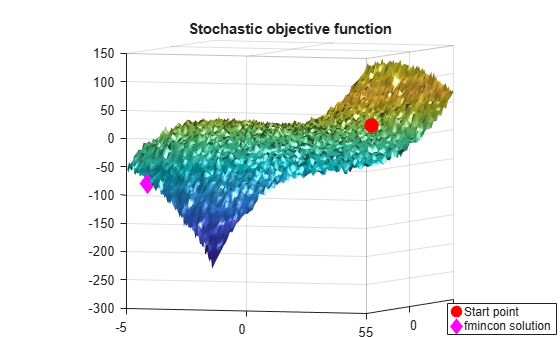
Stochastic Objective Function
Now perturb the objective function by adding random noise.
rng(0,'twister') % Reset the global random number generator peaknoise = 4.5; Objfcn = @(x) smoothFcn(x,peaknoise); % Handle to the objective function. % Plot the objective function (non-smooth) fig = figure('Color','w'); showSmoothFcn(Objfcn,range); title('Stochastic objective function') ax = gca; ax.CameraPosition = [-31.0391 -85.2792 -281.4265]; ax.CameraTarget = [0 0 -50]; ax.CameraViewAngle = 6.7937;
Run fmincon on a Stochastic Objective Function
The perturbed objective function is stochastic and not smooth. fmincon is a general constrained optimization solver which finds a local minimum using derivatives of the objective function. If you do not provide the first derivatives of the objective function, fmincon uses finite differences to approximate the derivatives. In this example, the objective function is random, so finite difference estimates derivatives hence can be unreliable. fmincon can potentially stop at a point that is not a minimum. This may happen because the optimal conditions seems to be satisfied at the final point because of noise, or fmincon could not make further progress.
[Xop,Fop] = fmincon(Objfcn,X0,[],[],[],[],LB,UB,[],options) figure(fig); hold on; ph = []; ph(1) = plot3(X0(1),X0(2),Objfcn(X0)+30,'or','MarkerSize',10,'MarkerFaceColor','r'); ph(2) = plot3(Xop(1),Xop(2),Fop,'dm','MarkerSize',10,'MarkerFaceColor','m'); % Add legend to plot legendLabels = {'Start point','|fmincon| solution'}; lh = legend(ph,legendLabels,'Location','SouthEast'); lp = lh.Position; lh.Position = [1-lp(3)-0.005 0.005 lp(3) lp(4)]; hold off;
First-order Norm of
Iter F-count f(x) Feasibility optimality step
0 3 -1.925772e+01 0.000e+00 2.126e+08
1 6 -7.107849e+01 0.000e+00 2.623e+08 8.873e+00
2 11 -8.055890e+01 0.000e+00 2.401e+08 6.715e-01
3 20 -8.325315e+01 0.000e+00 7.348e+07 3.047e-01
4 48 -8.366302e+01 0.000e+00 1.762e+08 1.593e-07
5 64 -8.591081e+01 0.000e+00 1.569e+08 3.111e-10
Local minimum possible. Constraints satisfied.
fmincon stopped because the size of the current step is less than
the value of the step size tolerance and constraints are
satisfied to within the value of the constraint tolerance.
Xop =
-4.9628 2.6673
Fop =
-85.9108
Run patternsearch
Now minimize the stochastic objective function using the Global Optimization Toolbox patternsearch solver. Pattern search optimization techniques are a class of direct search methods for optimization. A pattern search algorithm does not use derivatives of the objective function to find an optimal point.
PSoptions = optimoptions(@patternsearch,'Display','iter'); [Xps,Fps] = patternsearch(Objfcn,X0,[],[],[],[],LB,UB,PSoptions) figure(fig); hold on; ph(3) = plot3(Xps(1),Xps(2),Fps,'dc','MarkerSize',10,'MarkerFaceColor','c'); % Add legend to plot legendLabels = [legendLabels, 'Pattern Search solution']; lh = legend(ph,legendLabels,'Location','SouthEast'); lp = lh.Position; lh.Position = [1-lp(3)-0.005 0.005 lp(3) lp(4)]; hold off
Iter Func-count f(x) MeshSize Method
0 1 -7.20766 1
1 3 -34.7227 2 Successful Poll
2 3 -34.7227 1 Refine Mesh
3 5 -34.7227 0.5 Refine Mesh
4 8 -96.0847 1 Successful Poll
5 10 -96.0847 0.5 Refine Mesh
6 13 -132.888 1 Successful Poll
7 15 -132.888 0.5 Refine Mesh
8 17 -132.888 0.25 Refine Mesh
9 20 -197.689 0.5 Successful Poll
10 22 -197.689 0.25 Refine Mesh
11 24 -197.689 0.125 Refine Mesh
12 27 -241.344 0.25 Successful Poll
13 29 -241.344 0.125 Refine Mesh
14 31 -254.624 0.25 Successful Poll
15 33 -254.624 0.125 Refine Mesh
16 35 -254.624 0.0625 Refine Mesh
17 37 -254.624 0.03125 Refine Mesh
18 39 -254.624 0.01562 Refine Mesh
19 41 -254.624 0.007812 Refine Mesh
20 42 -256.009 0.01562 Successful Poll
21 44 -256.009 0.007812 Refine Mesh
22 47 -256.009 0.003906 Refine Mesh
23 50 -256.009 0.001953 Refine Mesh
24 53 -256.009 0.0009766 Refine Mesh
25 56 -256.009 0.0004883 Refine Mesh
26 59 -256.009 0.0002441 Refine Mesh
27 62 -256.009 0.0001221 Refine Mesh
28 65 -256.009 6.104e-05 Refine Mesh
29 68 -256.009 3.052e-05 Refine Mesh
30 71 -256.009 1.526e-05 Refine Mesh
Iter Func-count f(x) MeshSize Method
31 74 -256.009 7.629e-06 Refine Mesh
32 77 -256.009 3.815e-06 Refine Mesh
33 80 -256.009 1.907e-06 Refine Mesh
34 83 -256.009 9.537e-07 Refine Mesh
patternsearch stopped because the mesh size was less than options.MeshTolerance.
Xps =
-4.9688 -5.0000
Fps =
-256.0095
Pattern search is not as strongly affected by random noise in the objective function. Pattern search requires only function values and not the derivatives, hence noise (of some uniform kind) may not affect it. However, pattern search requires more function evaluation to find the true minimum than derivative based algorithms, a cost for not using the derivatives.
Related Topics
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)