Developing mechatronic systems requires integrating physical subsystems with control systems and embedded software. Engineers use Model-Based Design to model, simulate, and verify multidisciplinary mechatronic systems from initial development to production.
With MATLAB, Simulink, and Simscape, you can:
- Understand complex system interactions from algorithm design to plant behavior
- Speed up development by working in parallel with multiple teams
- Predict and optimize system performance
- Improve the quality of mechatronic systems and test using fewer hardware prototypes
- Eliminate manual coding errors by automatically generating code from simulation models
- Maintain traceability from requirements to design to code
- Reuse design models as operational digital twins
“Using Simulink for Model-Based Design enables us to develop the sophisticated pneumatic controls required for the Bionic Handling Assistant and other mechatronic designs. With Simulink PLC Coder, it is now much easier to get from a design to a product.”
Dr. Rüdiger Neumann, Festo
Using MATLAB, Simulink, and Simscape for Mechatronic System Design


Modeling
Use Simscape to develop system or component level models to represent the physical portions of the system in the electrical, mechanical, or fluid domains. Import designs from existing CAD files to visualize 3D physical components and SPICE subcircuits to incorporate manufacturer specific behavior. Optimize system performance and detect integration errors early in development via simulation. Repurpose simulation models for virtual commissioning or operational digital twins.
Discover Customer Success
Explore Products
Control Design and Supervisory Logic
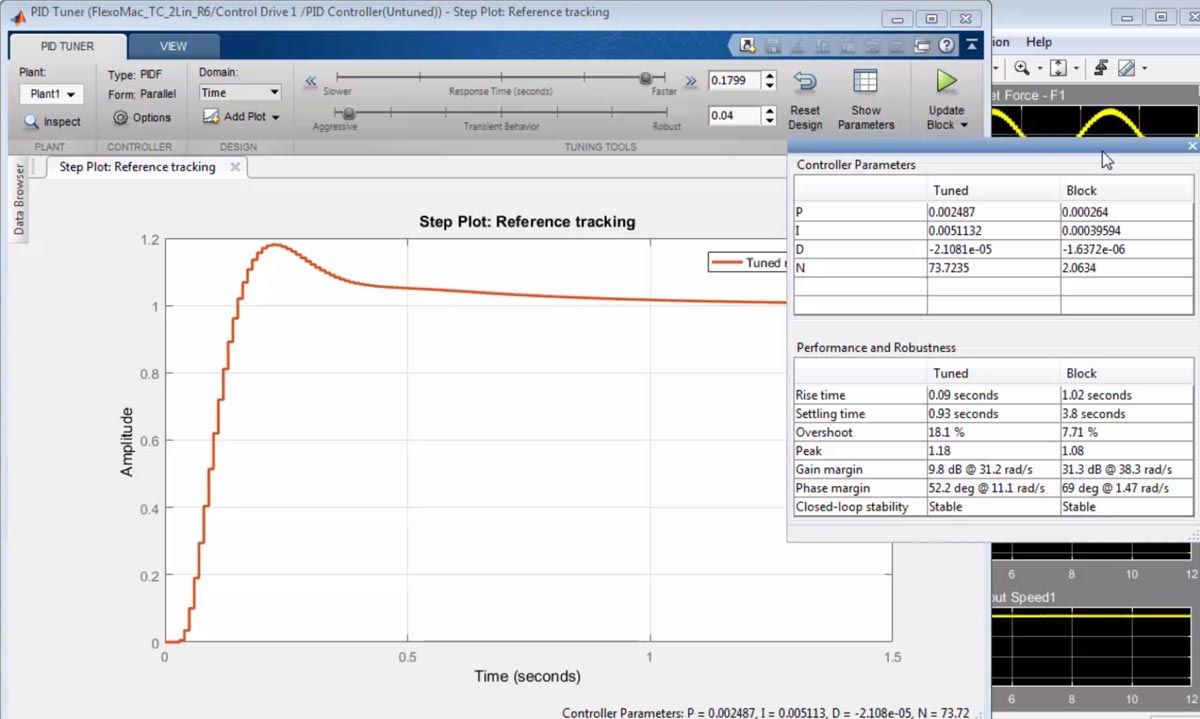
Linearize nonlinear physical models to develop closed-loop control systems with linear control techniques, like Bode plots or root locus, or use advanced control strategies, like model predictive control or robust control. Leverage prebuilt functions and interactive tools to automatically tune and optimize controllers to meet the performance requirements and stability constraints of your system. Analyze key performance and stability characteristics in the time and frequency domains such as overshoot, rise time, phase margin, and gain margin.
Develop and verify state machines for supervisory control and error handling. Use graphical animation to analyze and debug supervisory logic while it is executing to identify potential design errors.
Discover Customer Success
- Johnson Controls Accelerates Industrial Controller Development for Magnetic-Bearing Centrifugal Liquid Chillers
- Metso Develops Controller for Energy-Saving Digital Hydraulic System for Papermaking Equipment Using Model-Based Design
- Mitsubishi Heavy Industries Develops Robotic Arm for Removing Nuclear Fuel Debris
Explore Products
Hardware-in-the-Loop Testing and Rapid Control Prototyping
Refine your algorithms with rapid control prototyping (RCP) to prepare for your production environment. Use hardware-in-the-loop (HIL) simulations of your plant and environment model to reduce physical prototypes. Run real-time simulations on Speedgoat hardware and analyze the results in MATLAB to improve the performance of your mechatronic system.

Explore Products
Production Code Generation
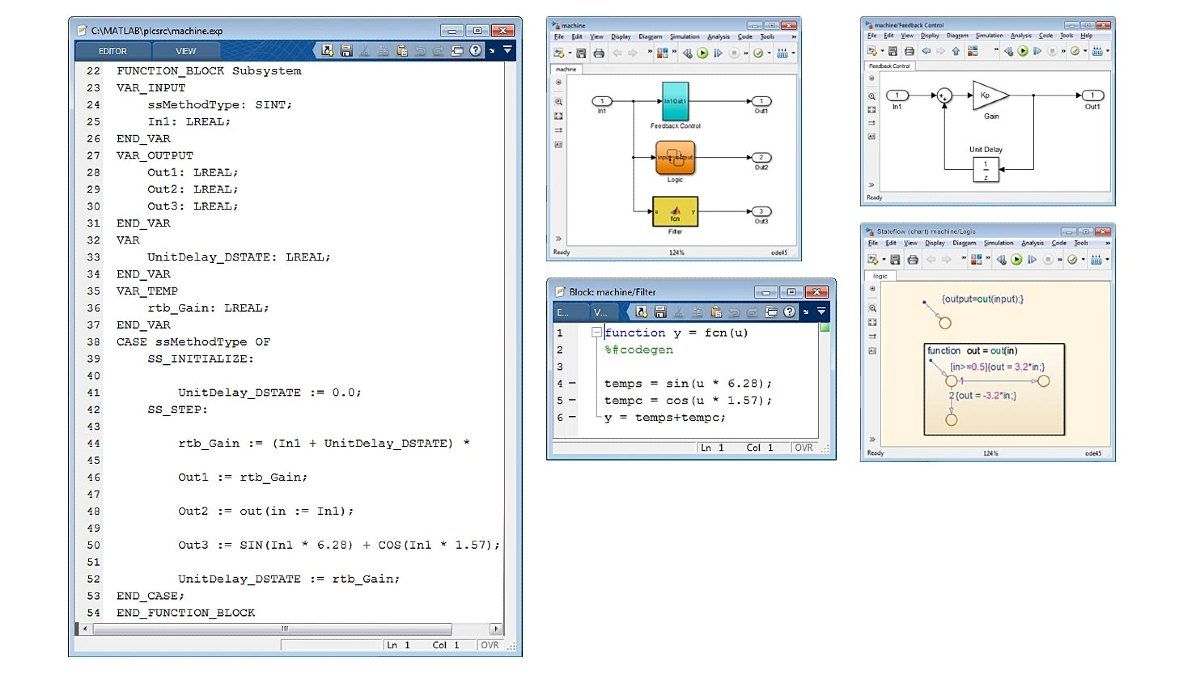
Eliminate manual coding errors by automatically generating optimized C, C++, IEC 61131-3 (Structured Text and Ladder Diagram), CUDA®, Verilog®, or VHDL code directly from MATLAB and Simulink. Leverage floating and fixed-point design tools to investigate performance tradeoffs. Integrate the generated hardware independent code into your PLC platform’s integrated development environment (IDE) for deployment on your real-time hardware and for online debugging.
Learn More
Explore Products
Verification and Validation
Author, import, and manage requirements in your model to maintain traceability across designs, tests, and generated code. Prove that designs meet requirements, automatically generate test cases for model coverage, and improve the quality of designs throughout the development process using formal test methods. Check model and code compliance using formal methods and static analysis. Find bugs and prove the absence of critical run-time errors with static code analysis. Produce reports and artifacts necessary to certify to industry standards such as IEC 61508, ISO 26262, and DO-178.


Let us know how we can help you.
Contact us for a custom evaluation, and get pricing based on your needs.
You can also select a web site from the following list
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)
Asia Pacific
- Australia (English)
- India (English)
- New Zealand (English)
- 中国
- 日本Japanese (日本語)
- 한국Korean (한국어)